




MarkingOnTheFly
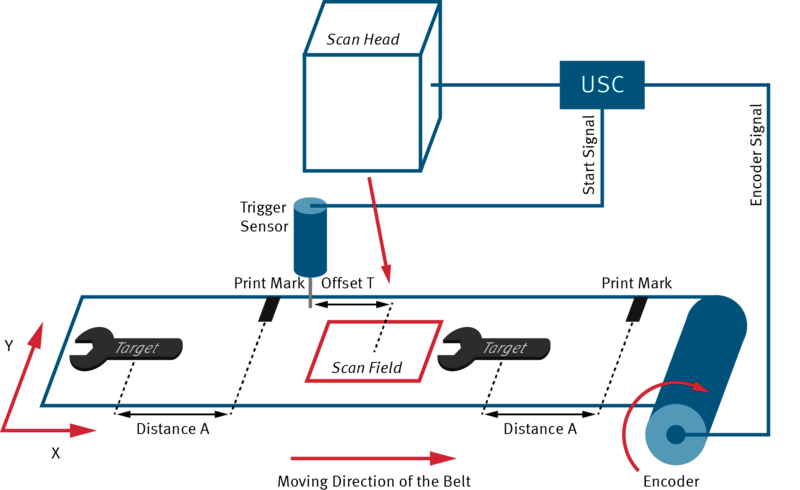
MOTF is a USC option designed for marking on moving targets.
The compensation of the target drift is achived by an external encoder connected to the USC card.
A simulation mode is available as well emulating constant speed. In this mode, no external encoder is needed.
Compensation of linear movements is possible as well as marking on rotating parts. Different control objects are available to mark jobs larger than the scanning area.